Rotující pohyb těla. Zákon rotačního pohybu
Tento článek popisuje důležitou část fyziky - "Kinematika a dynamika rotačního pohybu".
Základní pojmy kinematiky rotačního pohybu
Rotační pohyb materiální bod kolem pevné osy se nazývá takový pohyb, jehož trajektorií je kružnice umístěná v rovině kolmé k ose a její střed leží na ose rotace.
Rotující pohyb pevného těla je pohyb, ve kterém se všechny body těla pohybují podél soustředných kružnic (jejichž středy leží na stejné ose) v souladu s pravidlem rotačního pohybu bodu materiálu.
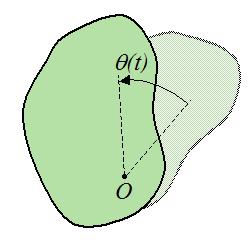
Nechte libovolné pevné těleso T otáčet kolem osy O, která je kolmá na rovinu obrázku. Na tomto těle zvolte bod M. Během otáčení bude tento bod popisovat kružnici o poloměru r kolem osy O.
Po určitém čase se poloměr otočí vzhledem k počáteční poloze o úhel Δφ.
Směr pravého šroubu (ve směru hodinových ručiček) je považován za pozitivní směr otáčení. Změna úhlu natočení s časem se nazývá rovnice rotačního pohybu pevné látky:
φ = φ (t).
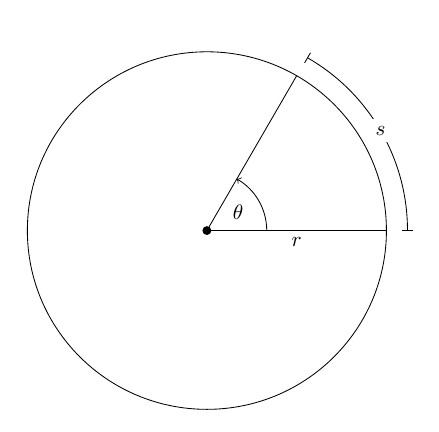
Je-li φ měřeno v radiánech (1 rad je úhel odpovídající oblouku o délce rovnající se jeho poloměru), pak délka oblouku kružnice ΔS, kterou materiálový bod M projde během času Δt, se rovná:
ΔS = Δφr.
Hlavní prvky kinematiky jednotného rotačního pohybu
Měření pohybu materiálu bodu v krátkém časovém úseku dt je elementární vektor rotace dφ .
Úhlová rychlost Materiální bod nebo tělo je fyzikální veličina, která je určena poměrem vektoru elementární rotace k době trvání této rotace. Směr vektoru lze určit pravidlem pravého šroubu podél osy O. Ve skalární podobě:
ω = dφ / dt.
Pokud ω = dφ / dt = const, pak se takový pohyb nazývá rovnoměrným rotačním pohybem. Když je úhlová rychlost určena vzorem
ω = φ / t.
Podle předběžného vzorce je rozměr úhlové rychlosti
[ω] = 1 rad / s.
Rovnoměrný rotační pohyb těla může být popsán obdobím rotace. Období rotace T je fyzikální veličina, která určuje dobu trvání těla kolem osy otáčení k provedení jedné úplné otáčky ([T] = 1 s). Pokud ve vzorci pro úhlovou rychlost vzít t = T, φ = 2 π (plná poloměr otáčení r), pak
ω = 2π / T,
Proto je období rotace definováno takto:
T = 2π / ω.
Počet otáček, které těleso dělá za jednotku času, se nazývá frekvence rotace ν, která se rovná:
ν = 1 / T.
Frekvenční jednotky: [ν] = 1 / c = 1 s -1 = 1 Hz.
Porovnáváme vzorce pro úhlovou rychlost a rychlost otáčení, získáme výraz vztahující se k těmto veličinám:
ω = 2.
Hlavní prvky kinematiky nerovnoměrného rotačního pohybu
Nerovnoměrný rotační pohyb pevného nebo materiálového bodu kolem pevné osy charakterizuje jeho úhlovou rychlost, která se mění s časem.
Vektor ε , který charakterizuje rychlost změny úhlové rychlosti, se nazývá vektor úhlového zrychlení:
ε = dω / dt.
Pokud se tělo otáčí, urychluje, to znamená dω / dt> 0 , vektor má směr podél osy ve stejném směru jako ω.
Pokud je rotační pohyb pomalý - dω / dt <0 , jsou vektory ε a ω opačně směrovány.
Poznámka Když nastane nerovnoměrný rotační pohyb, vektor ω se může měnit nejen v rozsahu, ale i ve směru (když se rotační osa otáčí).
Vztah veličin charakterizujících translační a rotační pohyb
Je známo, že délka oblouku s úhlem natočení poloměru a jeho hodnotou souvisí
ΔS = Δφ r.
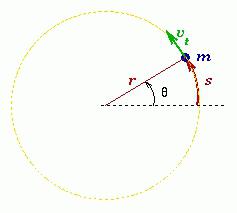
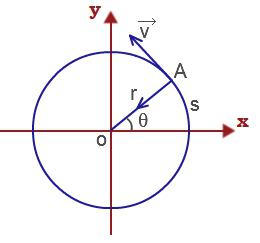
Pak lineární rychlost materiálu bodu vykonávat rotační pohyb
u = ΔS / Δt = Δφr / Δt = ωr.
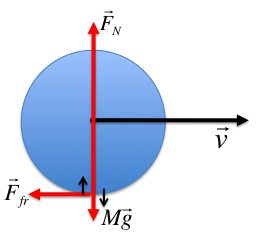
Normální zrychlení materiálu, které rotuje pohyb vpřed definujeme následovně:
a = υ 2 / r = ω 2 r 2 / r.
Takže ve skalární podobě
a = ω 2 r.
Tangenciální zrychlený bod materiálu, který provádí rotační pohyb
a = ε r.
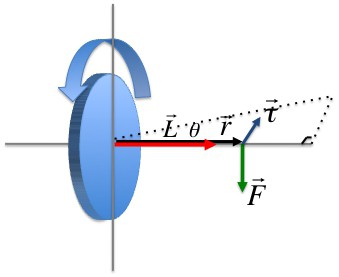
Moment hybnosti materiálu
Vektorový produkt vektoru poloměru trajektorie hmotného bodu hmoty m i jeho hybností se nazývá úhlová hybnost tohoto bodu vzhledem k ose rotace. Směr vektoru lze určit pravidlem pravého šroubu.
Moment hybnosti bodu materiálu ( L i ) směřuje kolmo k rovině natočené r i a i i a vytvoří s sebou tři pravé vektory (tj. Při pohybu z konce vektoru r i na i i pravý šroub ukazuje směr vektoru L i ).
Ve skalární podobě
L = m i i i r i sin (υ i , r i ).
Vzhledem k tomu, že při pohybu v kruhu jsou vektor poloměru a lineární vektor rychlosti pro i-tý materiálový bod vzájemně kolmé,
sin (υ i , r i ) = 1.
Takže úhlová hybnost bodu materiálu pro rotační pohyb bude mít podobu
L = m i i i i i .
Moment síly působící na i-tý materiálový bod
Vektorový produkt vektoru poloměru, který se udržuje v místě působení síly, touto silou se nazývá moment síly působící na i-tý materiálový bod vzhledem k ose rotace.
Ve skalární podobě
M i = r i F i sin (r i , F i ).
Za předpokladu, že r i sinα = l i , Mi i = l i F i .
Hodnota l i rovnající se délce kolmice, snížené od bodu otáčení ke směru síly, se nazývá rameno síly F i .
Dynamika rotace
Rovnice dynamiky rotačního pohybu je psána jako:
M = dL / dt.
Znění zákona je následující: rychlost změny momentu hybnosti těla, která se otáčí kolem pevné osy, se rovná výslednému momentu kolem této osy všech vnějších sil aplikovaných na tělo.
Moment impulsu a okamžiku setrvačnosti
Je známo, že pro i-tý materiálový bod je úhlová hybnost ve skalární podobě daná vzorecem
L i = m i i i i i .
Pokud namísto lineární rychlosti nahradíme jeho výraz úhlovým:
i i = ωr i ,
pak výraz pro momentální hybnost má formu
L i = m i r i 2 ω.
Množství I i = m i r i 2 se nazývá moment setrvačnosti kolem osy i-tého bodu materiálu absolutně tuhého tělesa procházejícího jeho středem hmoty. Pak se uvádí úhlová hybnost hmotného bodu:
L i = I i ω.
Moment impulsu absolutně tuhého těla je psán jako součet impulzních momentů hmotných bodů, které tvoří toto tělo:
L = Iω.
Moment síly a moment setrvačnosti
Zákon rotačního pohybu zní následovně:
M = dL / dt.
Známý představuje okamžik tělový impuls možné v okamžiku setrvačnosti:
L = Iω.
Pak
M = Id / dt.
Vzhledem k tomu, že úhlové zrychlení je určeno výrazem
ε = dω / dt,
získáme vzorec pro okamžik síly reprezentovaný okamžikem setrvačnosti:
M = Iε.
Poznámka Moment síly se považuje za pozitivní, jestliže je úhlové zrychlení, které je způsobeno, větší než nula a naopak.
Steinerova věta. Zákon přidání okamžiků setrvačnosti
Pokud je osa otáčení těla skrz centrum hmoty to neprojde, pak vzhledem k této ose najdete jeho moment setrvačnosti podle Steinerovy věty:
I = I0 + ma 2 ,
kde I 0 - počáteční moment setrvačnosti těla; m je tělesná hmotnost; a je vzdálenost mezi osami.
Pokud se systém, který se točí okolo pevné osy, skládá z n těl, pak se celkový moment setrvačnosti tohoto typu systému rovná součtu momentů, které to činí (zákon přidání momentů setrvačnosti).