Plné zrychlení a jeho součásti. Zrychlení tangenciální a normální zrychlení. Vzorce a příklad řešení problémů
V kinematiku je nutné, aby bylo jednoznačně určeno charakteristiky pohybu těla v jakémkoli bodě trajektorie, je třeba znát jeho rychlost a zrychlení. Časová závislost těchto veličin poskytuje všechny potřebné informace pro výpočet cesty, jíž tělo cestuje. Uvažujme podrobněji v článku, co je tangenciální a normální zrychlení zrychlení.
Ve fyzice
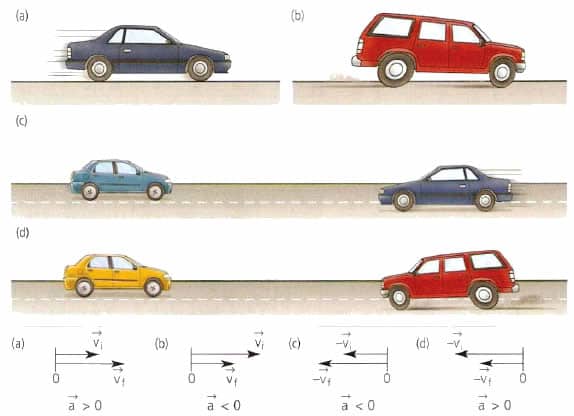
Před zvážením zrychlení pro mechanický pohyb, normální a tangenciální zrychlení se seznámíme s fyzickým konceptem. Definice zrychlení je poměrně jednoduchá. Ve fyzice pod ní rozumí charakteristická změna rychlosti. Ta druhá je vektorová veličina, která určuje rychlost změny souřadnic pohybujícího se objektu v prostoru. Rychlost se měří v metrech za sekundu (ujetá vzdálenost za jednotku času). Pokud je označen symbolem v¯, pak bude matematická definice zrychlení a¯ vypadat takto:
a¯ = dv¯ / dt
Tato rovnost definuje tzv. Plné okamžité zrychlení. Říká se okamžitě, protože charakterizuje změnu rychlosti pouze v daném čase.
Pokud je pohyb rovnoměrně zrychlen, tj. Po dlouhou dobu zrychlení nezmění jeho modul a směr, pak můžeme napsat následující vzorec k určení:
a¯ = Δv¯ / Δt
Kde Δt >> dt. Hodnota here se nazývá průměrné zrychlení, které se obecně liší od okamžitého.
Zrychlení se měří v systému SI v metrech za sekundu (m / s 2 ).
Trajektorie a součásti plné zrychlení
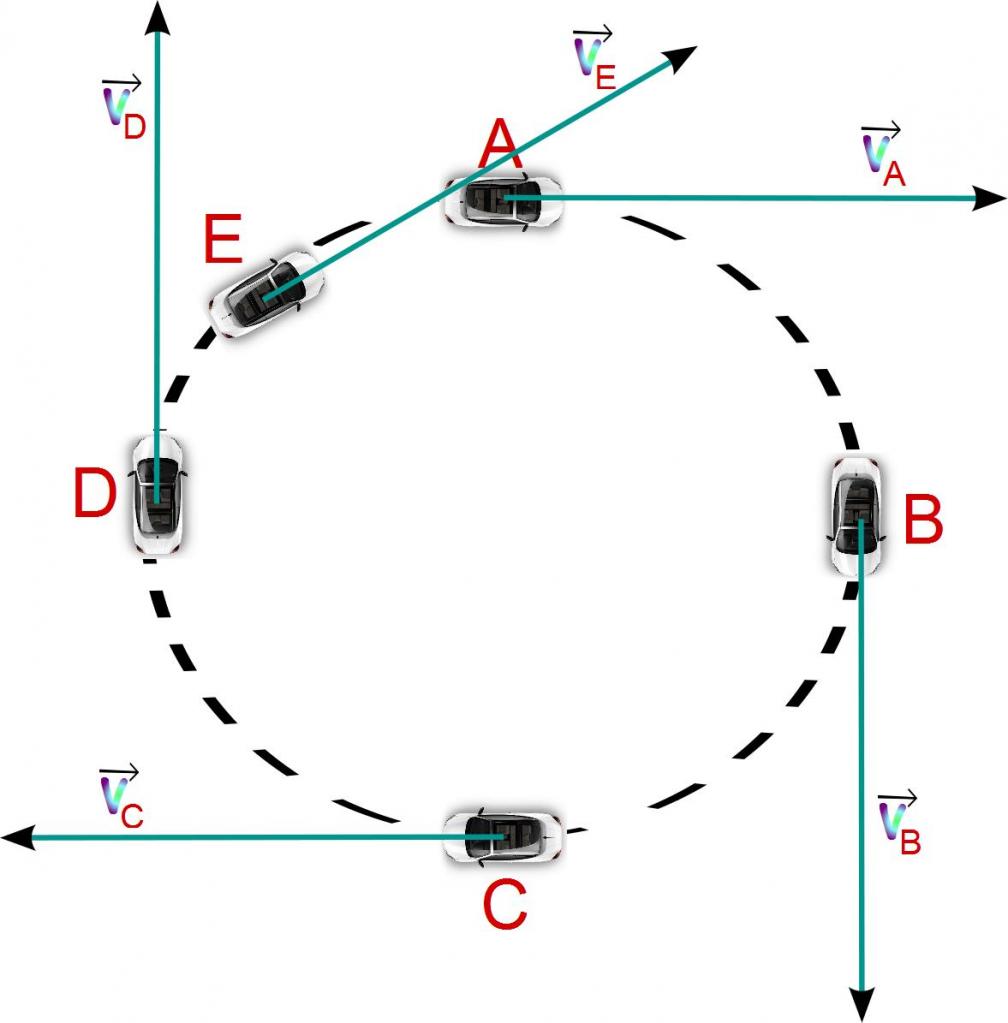
Nejčastěji se těla v přírodě pohybují po zakřivených trajektech. Příklady takového pohybu jsou: otáčení planet ve svých oběžných drahách, parabolické pádu kamene na zemi, otáčení aut. V případě křivočaré trajektorie je rychlost kdykoli směřována tangenciálně k danému trajektorii. Jak se řídí zrychlení?
Chcete-li odpovědět na výše uvedenou otázku, zapisujeme rychlost těla v následujícím tvaru:
v¯ = v * u t ¯
Zde t je vektor rychlosti jednotky, index t znamená, že je směrován tangenciálně k trajektorii (tangenciální složka). Symbol v označuje rychlostní modul v.
Nyní, po definici akcelerace, můžeme rozlišit rychlost s ohledem na čas, máme:
a¯ = dv¯ / dt = dv / dt * u t ¯ + v * d (u t ¯) / dt
Celkové zrychlení a¯ je tedy vektorový součet dvou složek. První a druhý termín se nazývá zrychlení normálního a tangenciálního bodu. Podívejte se na tyto komponenty blíže.
Ad
Tangenciální zrychlení
Napsali jsme opět vzorec této komponenty plného zrychlení:
a t ¯ = dv / dt * u t ¯
Tento výraz nám dovoluje popsat vlastnosti t ¯:
- Je směrován stejným způsobem jako rychlost samotná nebo opačná, tj. Podél tečny k trajektorii. To je doloženo elementárním vektorem u t ¯.
- Charakterizuje změnu rychlosti v absolutní hodnotě, což je odrazeno faktorem dv / dt.
Tyto vlastnosti nám umožňují udělat důležitý závěr: u přímočarého pohybu jsou plné a tangenciální akcelerace stejná hodnota. V případě zakřiveného pohybu je celkové zrychlení vždy větší než jeho tangenciální. Při zvažování fyzických úkolů pro přímočarý jednotně zrychlený pohyb mluví o této složce zrychlení.
Zrychlení normální
Vzhledem k tématu rychlosti, akcelerace tangenciální a zrychlení normálu uvádíme popis poslední hodnoty. Napsali jsme vzorec:
a n ¯ = v * d (u t ¯) / dt = v * d (u t ¯) / dL * dL / dt
Abychom výslovně napsali pravou stranu rovnosti, používáme následující vztahy:
dL / dt = v;
d (ut ¯) / dL = 1 / r
Zde dL je vzdálenost ujetá tělem v časovém intervalu dt, r je poloměr zakřivení trajektorie. První výraz odpovídá definici rychlosti, druhá rovnost vyplývá z geometrických úvah. Pomocí těchto vzorců získáváme konečný výraz pro normální zrychlení:
Ad
a n ¯ = v 2 / r
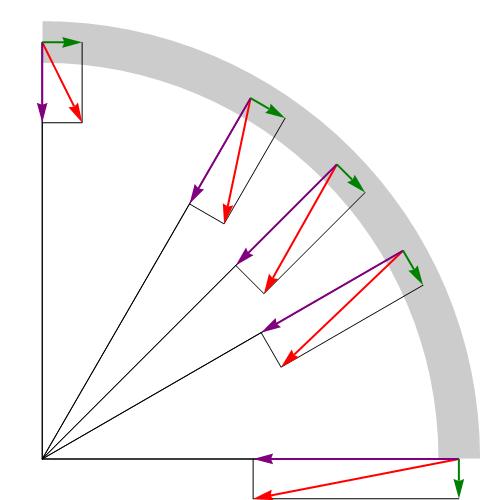
To znamená, že hodnota n ¯ nezávisí na změně rychlosti jako na tangenciální složce, ale je určena výlučně svým modulem. Normální zrychlení podél normálu k této části trajektorie je směrováno, tj. Směrem ke středu zakřivení. Například při pohybu po kruhu je vektor a n ¯ směrován do jeho středu, proto se normální zrychlení často nazývá centrieta.
Pokud je zrychlení tangenciální pro změnu velikosti rychlosti, normální složka je zodpovědná za změnu ve vektoru rychlosti, to znamená, že určuje trajektorii těla.
Plné, normální a tangenciální zrychlení
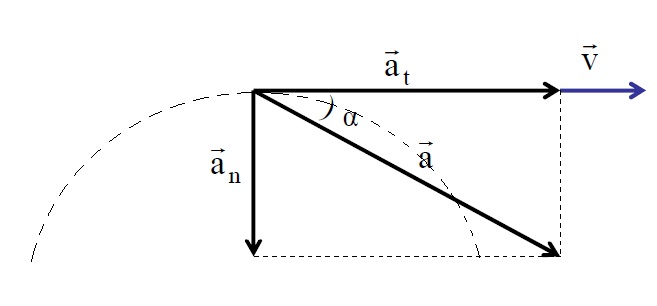
Poté, co jsme se zabývali konceptem zrychlení a jejími součástmi, nyní dáváme vzorec, který nám umožňuje určit plné zrychlení. Vzhledem k tomu, že uvažované součásti jsou směrovány v úhlu 90 ° vůči sobě navzájem, lze pro určení absolutní hodnoty jejich vektorové sumy použít Pythagorovu větu. Vzorec pro plné zrychlení je:
a = √ (a t 2 + a n 2 )
Směr velikosti a může být určen vzhledem k vektoru kterékoli ze složek. Například úhel mezi a¯ a a n¯ se počítá jako:
θ = arktan (a t / a n )
Vzhledem k výše uvedenému vzorci modulu a můžeme konstatovat: s rovnoměrným pohybem podél kruhu se plné zrychlení shoduje s centriletním.
Řešení problémů
Nechte těleso v kruhu s poloměrem 1 metr. Je známo, že jeho rychlost se liší podle následujícího zákona:
v = 2 * t 2 + 3 * t
Je nutné stanovit akcelerační tangenciální a normální zrychlení v okamžiku t = 4 sekundy.
Pro tangenciální máme:
a t = dv / dt = 4 * t + 3 = 19 m / s 2
Abyste zjistili modul normálního zrychlení, musíte nejdříve vypočítat hodnotu rychlosti v daném časovém okamžiku. Máme:
v = 2 * 4 2 + 3 * 4 = 44 m / s
Nyní můžete použít vzorec pro n :
a n = v 2 / r = 44 2/1 = 1936 m / s 2
Proto jsme určili všechna množství, která byla nutná k nalezení problému.