DC elektrické stroje: účel, konstrukce, zařízení a princip činnosti
Stroje stejnosměrný proud (MPT) je obecný termín, který kombinuje generátory (GPT) a motory (DPT). Když se hovoří o MAT, zpravidla se jedná o bipolární stroje, které mají střídavé "severní" a "jižní" magnetické budicí póly a mechanické nebo elektronické rozvaděče proudu otáčejícího se kotoučového vinutí jedním kruhovým pólem (na rozdíl od unipolárních strojů). Budeme také dodržovat tento princip.
Klasifikace MAT
V elektrotechnice a v teorii elektrických strojů je obvyklé rozdělit MPT na zařízení s explicitními a implicitně vyjádřenými budicími póly, s válcovým nebo vícenásobným lůžkem, s excitací stejnosměrným proudem nebo permanentními magnety, s mechanickým komutátorovým kolektorem ukotveným nebo bezkontaktním. Jmenování DC strojů je dělí na všeobecné průmyslové a specializované. Mezi těmito druhými se může jmenovat například trakční DPT používaná v železniční dopravě. Tam jsou také metalurgické DPT, zejména motory pro válcovny, atd.
Jak je známo, DC vinutí jsou rozdělena na pole vinutí (OM) a armaturu (OH). První slouží k excitaci magnetického pole zařízení a druhá k odběru energie z napájecí sítě v režimu motoru nebo k napájení elektrického zatížení v režimu generátoru. Existují také vinutí dalších pólů, které slouží k usnadnění procesu přepínání.
Elektrické stroje DC, bez ohledu na to, zda jsou generátory nebo motory, lze klasifikovat na základě schémat zapojení jejich vinutí a vinutí armatur. Mohou tvořit jeden elektrický obvod nebo nemusí mít vůbec žádné elektrické spojení (nezávislé buzení). Tento klasifikační princip rozděluje MAT na dva hlavní typy. Porozumíte jejich další klasifikaci z níže uvedeného schématu. 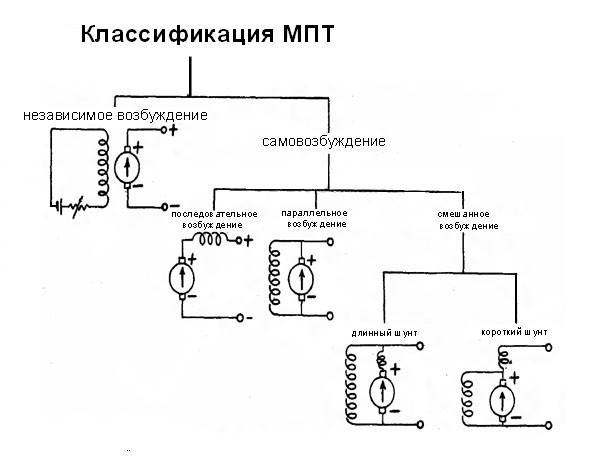
Zařízení DC zařízení
GPT lze použít jako DPT bez změn návrhu. Samozřejmě, že průmysl vyrábí stroje určené k práci jako motory a stroje, které jsou generátory. Nicméně rozdíly mezi nimi spočívají v konstrukci jednotlivých částí a ve fázi obecného seznámení lze ignorovat. V důsledku toho budeme obecně zkoumat zařízení stejnosměrného stroje bez ohledu na režim jeho provozu.
Na následujícím obrázku je znázorněn průřez jednoduchého MPT se dvěma dvojicemi odlišných pólů. Jeho konstrukce obsahuje dvě hlavní části: stator a kotvu. Zvažte, odkud se skládají. 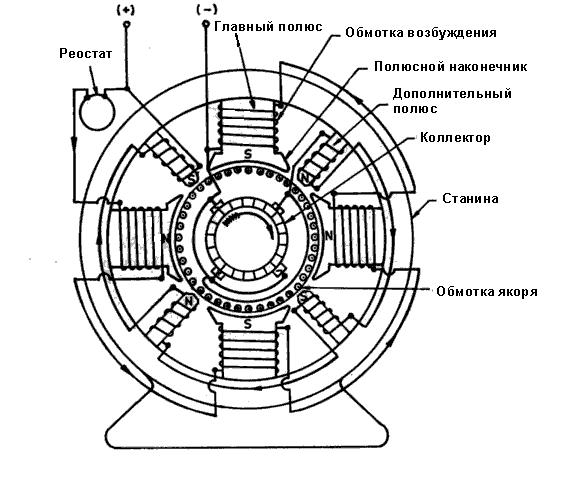
Stator obsahuje rám, stejně jako hlavní a přídavné póly mezi nimi (nezobrazené na obrázku).
Lůžko je vnější konstrukční kryt MPT. Může být tvarována z litiny (na strojích starých konstrukcí) nebo svařena z tlustých ocelových plechů. Lůžko mechanicky pevně drží celou sestavu MPT. Kromě toho slouží jako magnetický vodič pro magnetický tok vytvářený hlavními póly.
Ty jsou upevněny na rámu pomocí šroubů nebo svařováním. Jejich hlavním úkolem je přenášet na sebe cívky excitačního navíjecího rámu a vzájemně se sériově zapojovat tak, aby se střídavě změnila magnetická polarita pólů, tedy po "severním" pólu, který by následoval "jih" atd.
Tyče (boty), které jsou prodloužením hlavních pólů, slouží dvěma účelům: zabránit posunu cívek a rovnoměrnému rozdělení pole excitace na většinu obvodu vzduchové mezery.
Kotva stroje DC se skládá z jádra s vinutím, pouzdra a hřídele. Jádro je ocelové rámy válcového tvaru, vyrobené z tenkých elektrických plechů z oceli, obalené na obou stranách izolačním lakem. To se provádí, aby se zabránilo výskytu vířivých proudů a snaží se uzavřít tloušťku jádra. Ve svých drážkách jsou uloženy části smyčky nebo vlnového vinutí kotvy, kolektor DC stroje a kartáče. Větrání kotvy musí být připojeno k externímu zdroji stejnosměrného proudu. Nemůžete však přímo připojit vinutí kolíky k síťovému vstupu, protože se otáčí. Proto mezi sítí a vinutím kotvy je nainstalován spínací kolektor, což je sada měděných desek izolovaných od sebe navzájem, tvořící vnější válcovou plochu oddělenou izolačními cestami. Pevná kontaktní kartáčka klouže, když se kotva s kolektorem otáčí. Pevné kartáče, které jsou fyzicky v kontaktu s vinutím rotační armatury, a s jejich pomocí se již můžete připojit k externí síti DC stroje.
Vývoj struktur MTF
První průmyslový design MPT se objevil v 70. letech. 19. století Zpočátku měli kroužkovou kotvu s toroidním (Gramovým) vinutím. Po vynalezu kotvicího kotouče získali konečný vzhled, zhruba odpovídá výše uvedenému obrázku. Nicméně návrh DC strojů v druhé polovině 20. století. prošla poměrně dramatickými změnami. Nejprve se dotýkali statoru. Namísto jasně vyjádřených hlavních pólů začali používat implicitní konstrukci pólů. V něm byla koncentrovaná excitační cívka každého hlavního pólu nahrazena mírně menšími cívkami umístěnými ve štěrbinách laminovaného statoru, které mají obdélníkový nebo vícenásobný tvar, jak je znázorněno na obrázku níže. Ve stejných drážkách statoru je umístěno kompenzační vinutí, které bude popsáno později. Výsledkem je mnohem snazší konstrukce DC zařízení. 
V souvislosti s vývojem řízeného asynchronního elektrického pohonu vyjádří někteří odborníci názor na bezprostřední vysídlení asynchronní motory DPT z jejich tradičních aplikací, jako jsou trakční pohony nebo pohonné metalurgické mechanismy. Je však příliš brzy o tom mluvit jako o fait accompli.
Obecná zásada formování vinutí kotvy
Každé vinutí kotvy je kontinuální elektrický obvod uzavřený sám o sobě, sestávající ze sériově spojených sekcí (cívek). V nejjednodušším případě může úsek představovat pouze jednu otočku se dvěma drážkovými vodiči nebo může být víceotáčková. Strany štěrbiny úseku jsou vždy od sebe vzdáleny o něco menší než rozdělení pólů - část obvodu kotvy spadá na jeden hlavní pól. Proto jsou v každém úseku vždy pod hlavními póly opačné polarity. V jednom uzavřeném obvodu jsou k kolektorovým deskám připojeny úseky. Způsob, jakým toto spojení určuje typ vinutí. Níže uvedený obrázek vysvětluje princip vytváření vinutí kotvy stejnosměrného stroje ze šesti otočných sekcí spojených na kolektorových deskách. 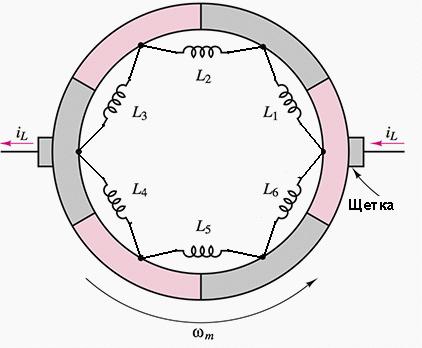
V místě znázorněném na obrázku štětce rozdělují vinutí kotvy na dvě paralelní větve: horní část, která se skládá ze sekcí L 1, L 2 , L 3 a dolní, sestávající z částí L 4 , L 5 , L 6 . Počet takových větví závisí na druhu vinutí kotvy, ale je vždy rovnoměrný a nesmí být menší než dva.
Svinutí a vinutí armatur
Jedná se o dva hlavní typy vinutí, z nichž každá má několik odrůd. Budeme zvažovat jejich nejjednodušší možnosti. Obrázek vlevo níže ukazuje tvar úseků, které tvoří jednoduché smyčkové vinutí armatury stejnosměrných strojů. Jak vidíte, stejný tvar úseků je charakteristický pro vinutí vln. 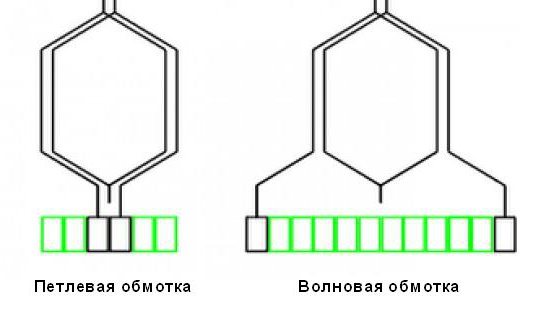
V první verzi je k i-té kolektorové desce připojen jeden (počáteční, startovací) výstup z každé dvojitého úseku a druhý (konečný, konečný) výstup je připojen na sousední (i + 1) kolektorovou desku s počátečním výstupem dalšího úseku výše). Závěry každé sekce jsou proto připevněny ke dvěma přilehlým deskám a samotná část sestávající ze dvou drážok a dvou čelních částí je tvarována jako smyčka (odtud název vinutí).
Část vlnového vinutí má závěry nesouvisející se sousedními sběratelskými deskami, ale s těmi, které jsou odděleny určitým krokem nazývaným krokem navíjení podél kolektoru. Pro jednoduché vinutí smyčky, yk = 1, a pro jednoduché vinutí viny, yk = (K ± 1) / p, kde K je počet kolektorových desek, p je počet párů hlavních pólů. Jak je zřejmé z obrázku, v důsledku tohoto způsobu spojování mají úseky tvar podobný poloviční vlně sinusové vlny, která způsobila jméno vinutí.
Princip činnosti v režimu generátoru
Podle původní interpretace tohoto jevu elektromagnetická indukce v pohybujícím se vodiči, daném Faradayem, když překročí magnetické pole při pohybu, EMF je v něm vyvolán. Podle tohoto principu je možné vysvětlit důvody vedení EMF u aktivních vodičů (ty, které jsou uloženy v drážkách) vinutí MPT kotvy. Ve skutečnosti se pohybují pod hlavními póly a protínají pole pole. Vzhledem k tomu, že jsou kontinuální, každý vodič kotvy, bez ohledu na to, zda je umístěn na svém povrchu (jak tomu bylo u prvních MPT konstrukcí) nebo ve štěrbinách, prochází pod tyčem, překročí všechny polní linie vystupující z jeho špičky. Směr působení indukovaný ve vodiči EMF lze určit použitím pravidla pravice, která ilustruje níže uvedený obrázek.
Drážkové vodiče kotvy jsou ve dvojicích zahrnuty do závitů svitků navíjení. Součet EMF cívky dává EMF cívky. Pevné kartáče rozdělují celé vinutí kotvy na několik (alespoň dvou) paralelních větví. Součet EMF ze všech cívek zahrnutých v paralelní větvi poskytuje EMF celé vinutí armatury MPT. Princip činnosti stejnosměrných strojů při práci s generátorem lze tedy formulovat následovně: armatura vzrušeného stroje se otáčí hnacím motorem, v jeho vinutí je indukováno elektromotorické napětí, které způsobuje tok stejnosměrného proudu kotvy v uzavřeném obvodu včetně vinutí, kolektoru, kartáčů a vnější sítě se zátěží.
Za přítomnosti proudu kotvy začne na něm působit brzdný elektromagnetický moment. Vytvoří zátěž pro hnací motor. Čím větší je elektrická zátěž generátoru, tím větší je jeho armatura zpomalena a čím vyšší je zatížení hnacího motoru. V tomto případě, podle zákon o ochraně energie ten druhý spotřebuje tolik paliva pro pohon armatury generátoru, takže chemická energie uvolněná během jeho spalování mínus energetické ztráty v motoru a generátoru by se rovnala energii, kterou elektrická zátěž pochází od stroje stejnosměrného proudu.
Zařízení a princip činnosti v režimu motoru
V tomto režimu je proud kotvy přiváděn do jeho vinutí z napájecí sítě během spouštění. Amperační síly působí na vodiče štěrbiny kotvy s proudem, které jsou pod hlavními póly. Jejich směr je určen pravidlem levé ruky, která je znázorněna na obrázku níže. Jejich součet vytváří rotační elektromagnetický moment armatury (na rozdíl od brzdění v generátorovém režimu) a rotuje se.
Ale v rotačních drážkovaných vodičích, stejně jako v generátorovém režimu, je indukováno emf, což dává celkovou emfinu vinutí kotvy. Působí naproti napájecímu napětí, částečně je vyvažuje. Jedná se o princip fungování stejnosměrných strojů při chodu motoru. V tomto případě se podle zákona o zachování energie odebírá z elektrárny tolik elektrické energie z motoru mechanická energie pro pohon připevněného mechanismu s ohledem na energetické ztráty (elektrické a mechanické). Jinými slovy, čím je motor mechanicky zatěžován, tím větší je hmotnost a moment setrvačnosti mechanizmů, které jsou v pohybu, nebo čím větší je odporový odpor prostředku, který brání jejich pohybu, tím větší je množství elektřiny spotřebované motorem ze sítě.
Na fyzickém mechanismu vedení EMF ve vodičích MPT vinutí kotvy
Je třeba poznamenat, že teoretickým fyzikům se nelíbí výše uvedený fyzický mechanismus vedení EMF, protože magnetické pole je jen spekulativní obraz vynalezený Faradayem, který ho popisuje. Žádný důkaz jejich skutečné existence jako skutečných fyzických objektů neexistuje.
Alternativní mechanismus pro cílení elektromotorických sil v pohyblivém štěrbinovém vodiči v navíjení kotvy MPT je účinek na elektrony uvnitř Lorentzovy síly, která je úměrná magnetické indukci na místě vodiče. Existuje však zde rozpor, který spočívá v tom, že uvnitř otvorů pro kotvy je magnetická indukce zanedbatelně malá a to neovlivňuje hodnotu EMF vodičů. Proto místo indukce v drážce je ve vzorci nahrazena indukce ve vzduchové mezeře, což samozřejmě je špatné, ale dává výsledek blízký výsledku pozorovanému v praxi.
Cesta z této kolize je přechodem k popisu magnetického pole, nikoliv pomocí vektoru magnetické indukce, ale pomocí vektorového magnetického potenciálu. Významný ruský elektrotechnik, KM Polivanov, byl aktivním příznivcem tohoto přístupu. Podrobněji s tímto problémem lze nalézt v díle autora.
MPT magnetické pole pod zatížením
V nabitém magnetickém poli existují dva typy magnetického toku: tok OM a tok RH generovaný proudy těchto vinutí. Síly prvního z nich jsou směrovány podél os dvojice pólů, kterými se zavírá, jak je znázorněno na obrázku 1 na obrázku níže. Takový proud buzení se nazývá podélný. Pokud je v MPT více než dva póly, je toto pole také podélně ve vzduchové mezeře pod špičkou každého z nich. 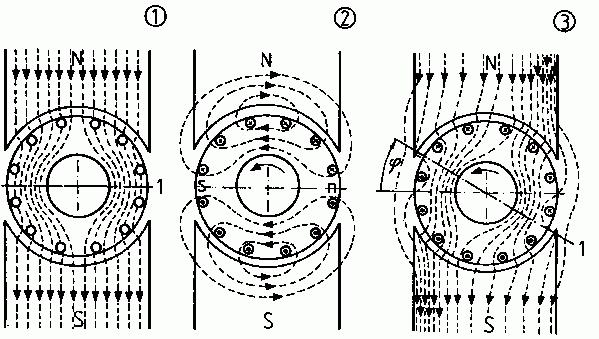
Napájecí vedení průtoku OHA jsou uzavřeny napříč osou pólů, proto se při použití na MPT mluví o příčném poli armatury, která je znázorněna na obrázku 2 na stejném obrázku.
Průtok kotvy je součtem průtoku buzení, čímž vzniká výsledný průtok. Toto znázorňuje reakci kotvy stroje s jednosměrným proudem, která spočívá v působení příčného pole na podélné pole buzení, jejichž linie síly jsou takto zkresleny, zahušťují se v blízkosti jednoho okraje pólu a zužují se v blízkosti druhého. V GPT dochází ke zesílení siločáru sil, tj. Jeho zesílení vzhledem k oblasti excitace, pod okrajem pólu pohybujícího se směrem k kotvě a v DPT - pod únikovou hranou, jak je znázorněno na obrázku 3.
Nežádoucí účinky reakce kotvy
V důsledku fenoménu magnetické nasycení oceli se výsledné pole pod okrajem stožáru, kde se zvětšuje, nemůže zvětšit do té míry, že je oslabené pod opačným okrajem. Výsledkem tohoto efektu je obecné snížení magnetického pole naplněného stroje. V případě generátoru oslabení pole snižuje generované napětí.
Reakce DC armatury zkresluje prostorový vzorec silových vedení, a proto je změna polohy magnetické neutrální (MN) - v bipolárním MPT je kolmá na silové vedení excitačního toku a shoduje se s geometrickým neutrálním GN. Karty by měly být umístěny na MN, jinak by to způsobilo jiskření pod nimi. Proto je vzhledem k reakci kotvy obtížné určit přesnou polohu MN. Nicméně pro to existují osvědčené metody v praxi.
Druhým negativním důsledkem tohoto účinku, který významně narušuje provozní charakteristiku stroje DC, je zvýšení maximálního napětí mezi sousedními deskami. Podívejte se znovu na schéma navíjení jednoduché smyčky. Pokud jsou strany některých jejích částí současně pod okraji dvou sousedících protilehlých hlavních pólů se zvýšeným polem v důsledku reakce kotvy, pak napětí indukované v této sekci a tudíž napětí mezi dvojicí sousedících kolektorových desek může významně překročit jeho hodnotu, když reakce armatury chybí tj. při volnoběhu. Takový přebytek se navíc obvykle vyskytuje najednou v několika částech kolektoru umístěných v oblastech zvětšeného pole. V důsledku toho může na kolektoru vzniknout takový jev jako kruhový požár, který ho může zcela zničit. Proto bez zvláštních konstrukčních metod potlačování reakce kotvy je prakticky nemožné provozovat stejnosměrný stroj se středním a vysokým výkonem.
Způsoby řešení reakce kotvy
Nejjednodušší a nejdůležitější z metod, které se objevily, bylo zvýšení vzduchové mezery ze středu na okraje špiček pólu, tj. Provedení rozdílné mezery. Současně se zvýšil magnetický odpor vůči toku reakce kotvy a její vliv na pole excitace se snížil. Odolnost však vzrůstala, což způsobilo zvýšení rozměrů cívek u hlavních pólů.
Pro oslabení toku armatury při výrobě hlavních pólů se používá elektrická ocel s magnetickou anizotropií vlastností (magnetická permeabilita) podél a přes osu pólů. Póly takové oceli mají dobrý podélný průtok buzení a špatný křížový tok kotvy. Taková ocel je však velmi drahá a její vlastnosti jsou silně závislé na teplotě a čase.
Konečně byla nalezena radikální cesta, jak řešit reakci kotvy DC stroje. Zařízení a zásada jeho působení se příliš nezměnily ve stejnou dobu, ale bylo přidáno ještě jedno vinutí - kompenzační. Je umístěna ve štěrbinách vytvořených na špičkách hlavních pólů (nebo ve štěrbinách statoru společně s budicími vinutími s implicitní strukturou pólů), jak je znázorněno na následujícím obrázku, a je zapojeno v sérii do vinutí kotvy, to znamená, že protéká stejným proudem.
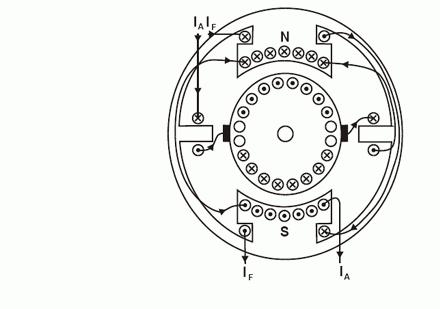
Směr proudění kolem závitů kompenzačního vinutí je však zvolen tak, že magnetický tok, který je excitován, je směrován směrem k toku reakce kotvy a kompenzuje ji.
Všechny moderní elektrické stroje se středním a vysokým výkonem jsou vybaveny takovým vinutím.