Vektorová hodnota ve fyzice: definice, označení, příklady
V matematice je vektor řízený segment určité délky. Ve fyzice se rozumí vektorová veličina jako úplná charakteristika určité fyzikální veličiny, která má modul a směr působení. Zvažte základní vlastnosti vektorů, stejně jako příklady fyzikálních veličin, které jsou vektorové.
Scalars a vektory
Scalars ve fyzice jsou parametry, které lze měřit a reprezentovat jediným číslem. Například teplota, hmotnost a objem jsou skalární, protože jsou měřeny počtem stupňů, kilogramů a krychlových metrů.
Ve většině případů se ukázalo, že číslo definující skalární hodnotu neobsahuje vyčerpávající informace. Například s přihlédnutím k takové fyzické charakteristice, jako je zrychlení, nestačí říci, že je to 5 m / s 2 , protože potřebujete vědět, kam směřuje, proti rychlosti těla, od určitého úhlu k této rychlosti nebo jinak. Kromě zrychlení je rychlost příkladem vektorového množství ve fyzice. Do této kategorie patří také síla, síla elektrického pole a mnoho dalších.
Ad
Podle definice vektorové veličiny jako segmentu nasměrovaného ve vesmíru může být reprezentován jako množina čísel (komponenty vektoru), pokud je zobrazena v určitém souřadném systému. Nejčastěji ve fyzice a matematice vznikají problémy, které popisují vektor, vyžadují znalost jeho dvou (problémy v rovině) nebo tři (problémy ve vesmíru).
Vektorová definice v n-dimenzionálním prostoru
V n-dimenzionálním prostoru, kde n je celé číslo, bude vektor jednoznačně určen, pokud jsou známy jeho n komponenty. Každá součást představuje souřadnici konce vektoru podél odpovídající osy souřadnic za předpokladu, že začátek vektoru je na začátku souřadného systému n-dimenzionálního prostoru. Výsledkem je, že vektor může být reprezentován jako: v = {a 1 , a 2 , a 3 , ..., a n }, kde a je skalární hodnota 1. složky vektoru v. Proto ve 3-dimenzionálním prostoru bude vektor psán jako v = {a 1 , a 2 , a 3 } a ve dvourozměrném prostoru - v = {a 1 , a 2 }.
Ad
Jak je uvedena vektorová hodnota? Jakýkoliv vektor v jednorozměrných, dvourozměrných a trojrozměrných prostorech může být reprezentován jako řízený segment ležící mezi body A a B. V tomto případě je označen jako AB → , kde šipka ukazuje, že jde o vektorovou hodnotu. Sekvence písmen může být určena od začátku vektoru až po konec. To znamená, že jestliže souřadnice bodů A a B, například v trojrozměrném prostoru, jsou {x 1 , y 1 , z 1 } a {x 2 , y 2 , z 2 }, pak se složky vektoru AB → rovnají {x 2- x 1 , y 2- y 1 , z 2 -z 1 }.
Grafické znázornění vektoru
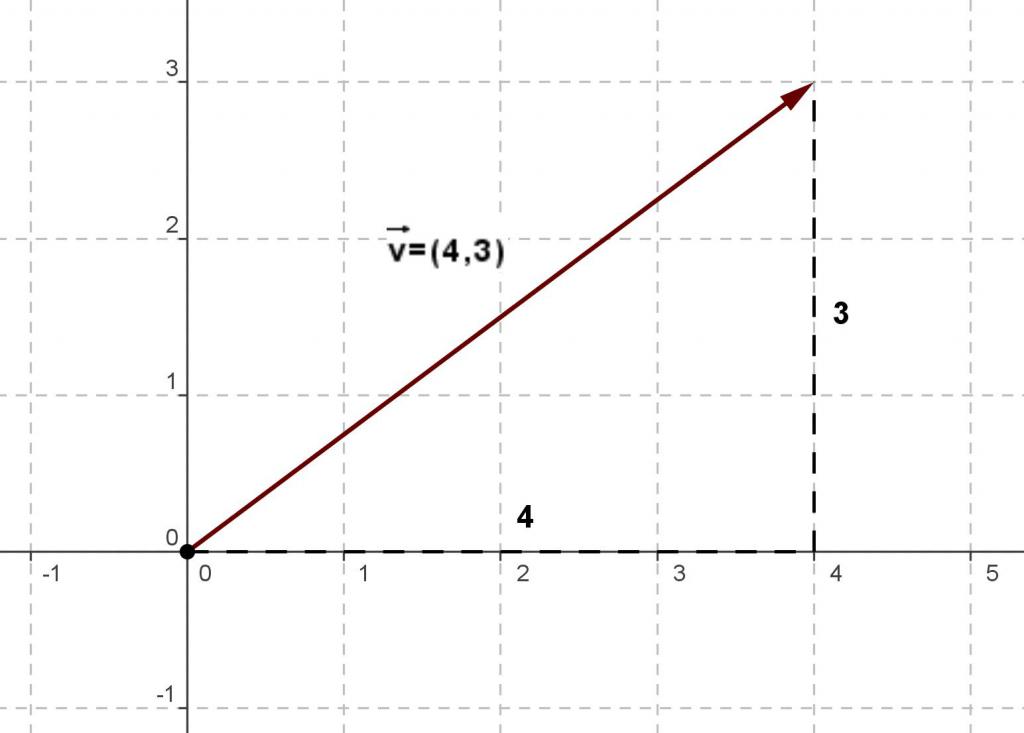
Na obrázcích je obvyklé znázornit vektorovou veličinu jako segment, na jejím konci je šipka ukazující směr fyzikální veličiny, jejíž reprezentace je. Tento segment je obvykle signován, například v → nebo F → , takže je jasné, která charakteristika je míněna.
Grafické znázornění vektoru pomáhá pochopit, kde se fyzikální množství aplikuje a jakým směrem. Kromě toho je vhodné provádět mnoho matematických operací ve vektorů pomocí jejich obrázků.
Ad
Operace matematických vektorů
Vektorové hodnoty, stejně jako běžné čísla, mohou být přidány, odečteny a vynásobeny jak navzájem, tak s jinými čísly.
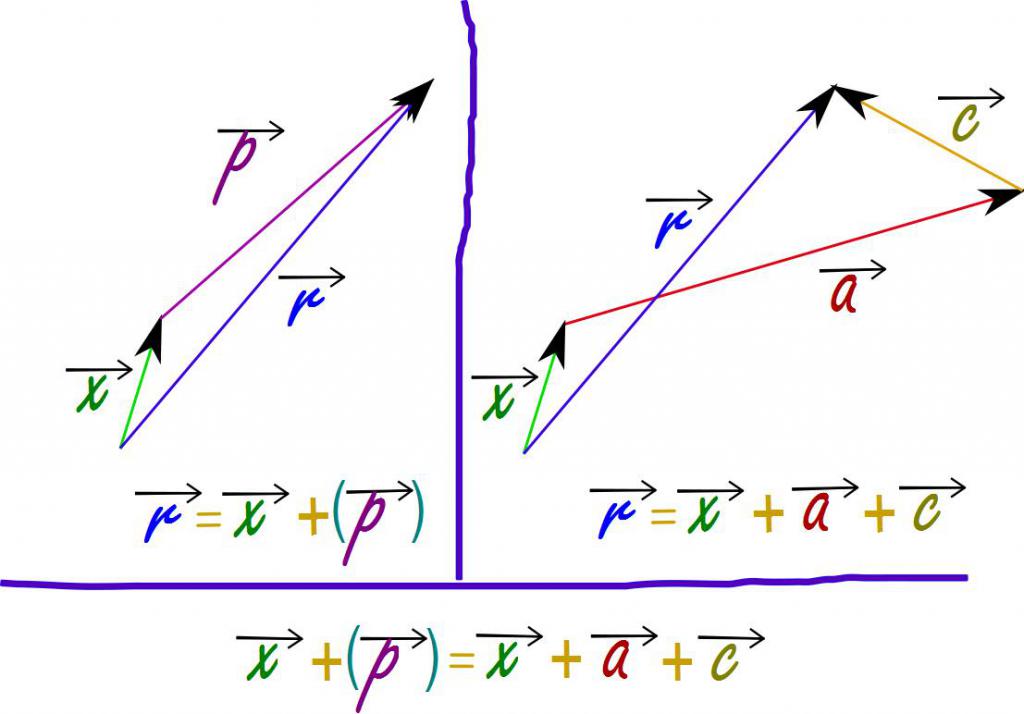
Součet dvou vektorů je třetí vektor, který je získán, pokud jsou součtové parametry umístěny tak, že konec prvního se shoduje se začátkem druhého vektoru a pak spojuje začátek prvního a konce druhé. K provedení tohoto matematického úkolu byly vyvinuty tři hlavní metody:
- Metoda rovnoběžníku, která sestává z konstrukce geometrického obrázku na dvou vektorech, které pocházejí ze stejného místa ve vesmíru. Diagonál tohoto paralelogramu, který vychází ze společného bodu začátku vektorů, bude jejich součtem.
- Metoda polygonu, jejíž podstatou je, že začátek každého následujícího vektoru by měl být umístěn na konci předchozího, potom celkový vektor spojuje počátek prvního a konce posledního.
- Analytická metoda, která spočívá v párovém přidávání odpovídajících složek známých vektorů.
Co se týče rozdílu vektorových veličin, může být nahrazeno přidáním prvního parametru k parametru, který je opačný ve směru k druhému.
Násobení vektoru určitým číslem A se provádí podle jednoduchého pravidla: toto číslo by mělo být násobeno každou složkou vektoru. Výsledkem je také vektor, jehož modul je A krát původní a směr je buď stejný nebo opačný než původní, vše závisí na znaménku čísla A.
Ad
Je nemožné rozdělit vektor nebo číslo do něj, ale dělení vektoru číslem A je analogické k vynásobení číslem 1 / A.
Skalární a vektorový produkt
Násobení vektorů lze provést dvěma různými způsoby: skalárními a vektorovými.
Skalární produkt vektorových veličin se nazývá takovou násobící metodou, výsledkem je jediné číslo, tj. Skalární. V maticové podobě je skalární produkt napsán jako řady prvku prvního vektoru na sloupci prvků druhého. Výsledkem je, že v n-dimenzionálním prostoru získáme vzorec: (A → * B → ) = a 1 * b 1 + a 2 * b 2 + ... + a n * b n .
Ve třírozměrném prostoru můžete definovat skalární produkt jinak. To provedete vynásobením modulů odpovídajících vektorů kosinem úhlu mezi nimi, tj. (A → * B → ) = | A → | * | B → | * cos (θ AB ). Z tohoto vzorce vyplývá, že pokud jsou vektory směrovány v jednom směru, potom je skalární produkt rovna násobení jejich modulů a pokud jsou vektory navzájem kolmé, pak se ukáže, že je nulová. Všimněte si, že modul vektoru v pravoúhlém souřadném systému je definován jako druhá odmocnina součtu čtverců složek tohoto vektoru.
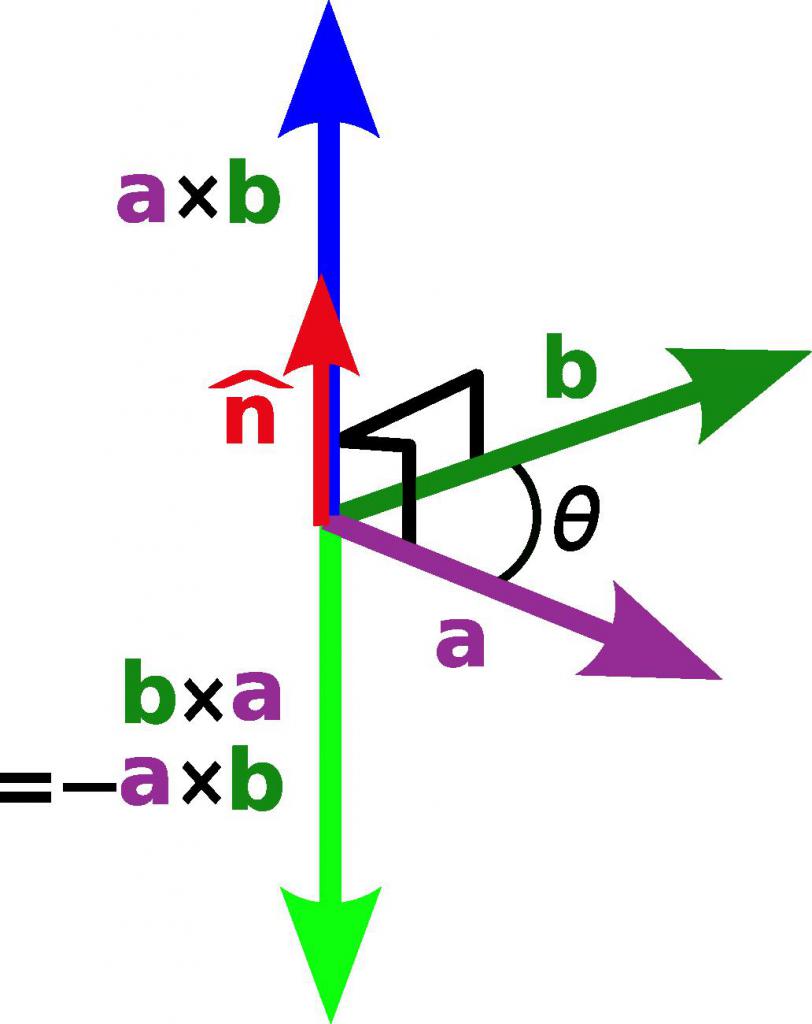
Pod vektorovým produktem rozumí toto znásobení vektoru vektorem, jehož výsledkem je také vektor. Jeho směr je kolmý na každý násobený parametr a délka je rovna výsledku modulů vektorů a sinus úhlu mezi nimi, to znamená A → B → → sin → ( AB ), kde x je označuje vektorový produkt. V maticové podobě je tento typ práce reprezentován jako determinant, jehož řady jsou elementární vektory daného souřadného systému a komponenty každého vektoru.
Ad
Obě skalární a vektorové produkty se používají v matematice a fyzice k určení mnoha veličin, například oblasti a objemu čísel.
Následující článek uvádí příklady vektorových veličin ve fyzice.
Rychlost a zrychlení
Rychlost ve fyzice je rychlost změny polohy daného materiálu. Rychlost v systému SI se měří v metrech za sekundu (m / s) a je označena symbolem v → . Při zrychlení si uvědomte rychlost změny rychlosti. Zrychlení se měří v metrech za sekundu (m / s 2 ) a je obvykle označeno symbolem a → . Hodnota 1 m / s 2 udává, že těleso zvyšuje každou sekundu svou rychlost o 1 m / s.
Rychlost a zrychlení jsou vektorová veličiny, které se podílejí na vzorcích druhého zákona Newtonu a posunu těla jako hmotného bodu. Rychlost je vždy směrována ve směru pohybu, zatímco zrychlení může být libovolně nasměrováno vzhledem k pohybujícímu se tělu.
Fyzická síla
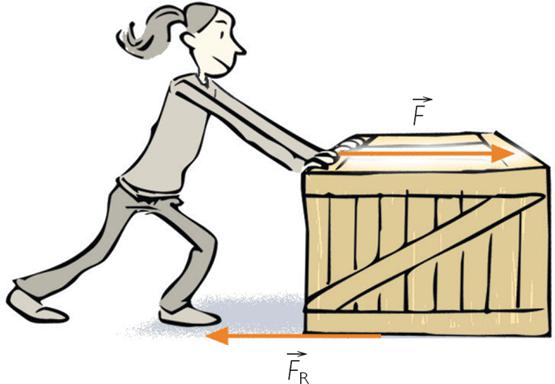
Pevnost je vektorová fyzikální veličina, která odráží intenzitu interakce mezi těly. Označuje se symbolem F → , měřeným v newtonech (H). Definice 1 N je síla schopná měnit otáčky tělesa o hmotnosti 1 kg na 1 m / s za každou sekundu času.
Tato fyzikální veličina je široce používána ve fyzice, protože je spojena s energetickými charakteristikami procesů interakce. Povaha síly může být velmi odlišná, např. Gravitační síly planet, síla, která způsobuje pohyb auta, elastické síly pevných médií, elektrické síly, které popisují chování elektrických nábojů, magnetické, jaderné síly, které určují stabilitu atomových jader atd.
Hodnota vektorového tlaku
Další hodnota úzce souvisí s pojmem síla - tlak. Ve fyzice se rozumí normální projekce síly na místě, na němž působí. Vzhledem k tomu, že síla je vektor, pak podle pravidla vynásobení čísla vektorem bude tlak také vektorovým množstvím: P → = F → S, kde S je oblast. Tlak se měří v Pascal (Pa), 1 Pa je parametr, při kterém kolmá síla 1 N působí na plochu 1 m 2 . Na základě definice je tlakový vektor směrován ve stejném směru jako vektor síly.

Ve fyzice se koncept tlaku často používá k studium jevů v kapalinách a plynech (například Pascalův zákon nebo ideální plynová rovnice státu). Tlak je úzce souvislý s teplotou těla, protože kinetická energie atomů a molekul, jejichž reprezentace je teplota, vysvětluje povahu samotného tlaku.
Síla elektrického pole
Na každém nabitém těle je elektrické pole, jehož pevnostní charakteristikou je jeho intenzita. Tato intenzita je definována jako síla působící na daném místě elektrického pole na jednotkové náboji umístěné v tomto bodě. Intenzita elektrického pole je označena písmenem E → a měří se v newtonech na přívěsek (H / Cl). Intenzivní vektor je směrován podél linie elektrického pole v jeho směru, pokud je náboj kladný, a proti němu, pokud je náboj negativní.
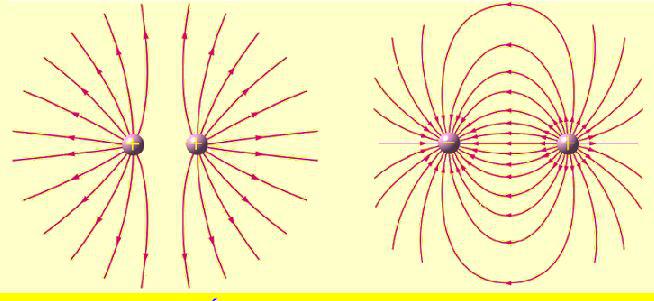
Elektrické pole generované bodovým nábojem může být určeno v kterémkoli okamžiku pomocí Coulombova zákona.
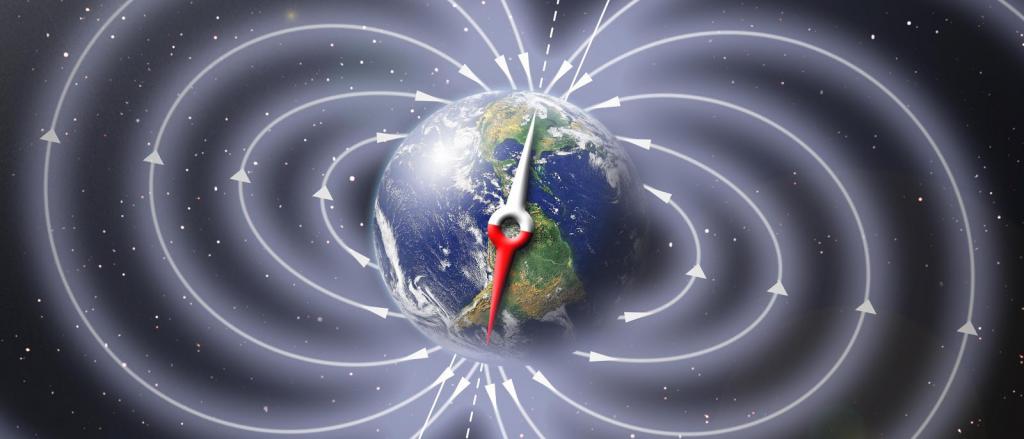
Magnetická indukce
Magnetické pole, jak je ukázáno v 19. století, vědci Maxwell a Faraday, je úzce spojeno s elektrickým polem. Tak, měnící se elektrické pole generuje magnetické pole a naopak. Proto jsou oba typy polí popsány z hlediska elektromagnetických fyzikálních jevů.
Magnetická indukce popisuje vlastnosti pevnosti magnetického pole. Je magnetická indukce skalární nebo vektorová? Můžete to pochopit, protože je známo, že je definována sílou F → působící na náboj q, která letí rychlostí v → v magnetickém poli podle následujícího vzorce: F → = q * | v → x B → |, kde B → - magnetická indukce. Při zodpovězení otázky skalární nebo vektorové magnetické indukce lze říci, že je to vektor, který je směrován ze severního magnetického pólu na jih. Naměřené B → v tesle (T).
Fyzická svíce
Dalším příkladem vektorového množství je candela, která se zavádí do fyziky světelným tokem, měřeným v lumenu, procházejícím povrchem ohraničeným úhlem 1 steradianu. Candela odráží jas světla, protože ukazuje hustotu světelného toku.