PID regulátor: popis, složení, nastavení
Velmi často je pro systémové procesy nezbytné, aby řízený parametr (například teplota nebo rychlost otáčení) byl schopen okamžitě reagovat na vnější vlivy a současně udržoval další hodnoty systémových konstant, jako je tlak, průtok atd. systém, který obsahuje několik ventilů pro odvodnění. K udržení konstantního, rovnoměrného průtoku u každého ventilu musí být tlak potrubí konstantní. Pokud systémové čerpadlo pohon pohon pak v případě 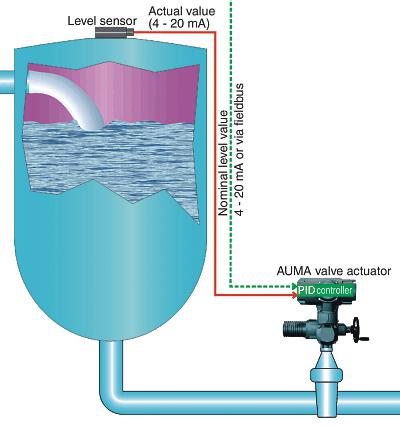 otevření jednoho nebo více ventilů musí být rychlost motoru zvýšena a v případě zavírání nižší. Tím bude v systému zachován konstantní tlak. Aby byla zajištěna taková práce, vyžaduje PID řadič. Systémový tlak se měří snímačem a porovná se s nastavenou hodnotou. Podle výsledků porovnání regulátor PID řídí rychlost motoru. V tomto článku se podíváme na to, co představuje takové zařízení.
otevření jednoho nebo více ventilů musí být rychlost motoru zvýšena a v případě zavírání nižší. Tím bude v systému zachován konstantní tlak. Aby byla zajištěna taková práce, vyžaduje PID řadič. Systémový tlak se měří snímačem a porovná se s nastavenou hodnotou. Podle výsledků porovnání regulátor PID řídí rychlost motoru. V tomto článku se podíváme na to, co představuje takové zařízení.
Co obsahuje PID řadič?
Za účelem odstranění chyb v systému se výše zmíněné zařízení skládá ze tří částí: integrální, diferenciální a proporcionální regulátory. Poměrné zařízení je základní, kde je referenční hodnota otáček úměrná chybě. Pokud je však použita pouze tato součást, bude v systému vždy přítomna chyba. Vysoké hodnoty tohoto zařízení vedou k výkyvům a nestabilitě systému a nízké hodnotě k "letargii". Pro odstranění chyb je použito integrované zařízení. Rychlost se zvyšuje až do okamžiku vyloučení chyby (s negativní chybou - klesá). Relativně malé hodnoty integrální součásti mají významný vliv na provoz zařízení jako celku. Je-li nastavení příliš vysoké, systém začne pracovat s překročením. Diferenciální přístroj odhaduje míru změny chyb, slouží ke zvýšení rychlosti systému. Nicméně, jak se zvyšuje rychlost regulátoru, zvyšuje se hladina překročení, což může vést k nestabilitě systému. Nejčastěji je tato součást nastavena na hodnotu blízkou nule, ale může být velmi užitečná v systému určování polohy. PID řadič dostal své jméno po prvních písmech těchto tří komponent. Jak je zřejmé z popisu zařízení, důležitým požadavkem pro správnou funkci zařízení je jeho ladění. 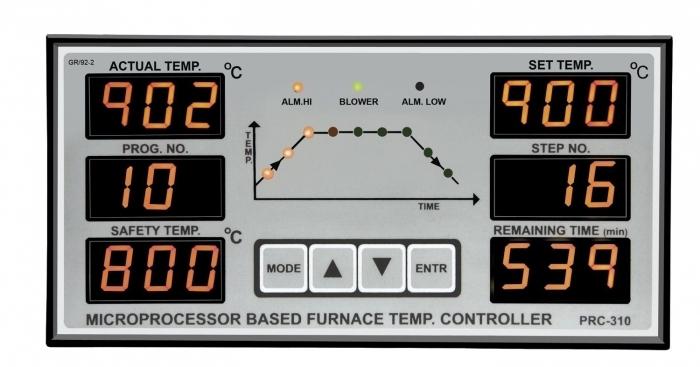
Nastavení řízení PID
Pro každý systém se nastavení zařízení provádí jednotlivě, zde uvážíme základní doporučení, která jsou společná různým situacím:
1. Nastavte diferenciální a integrální součásti na nulu. Nastavte maximální rychlost a pozorujte reakci.
2. Zvětšete poměrnou složku a zopakujte první odstavec. Pokračujte v tomto postupu, dokud nezačne proces automatického kmitání.
3. Zmenšete tento komponent na stabilitu systému.
4. Nastavte hodnotu poměrné složky o 15% pod udržitelnou.
5. Nastavte stupňovitou hodnotu maximální rychlosti změnou integrované součásti.
6. Obvykle není třeba nastavit diferenciální regulátor.
7. Zkontrolujte stabilitu systému. 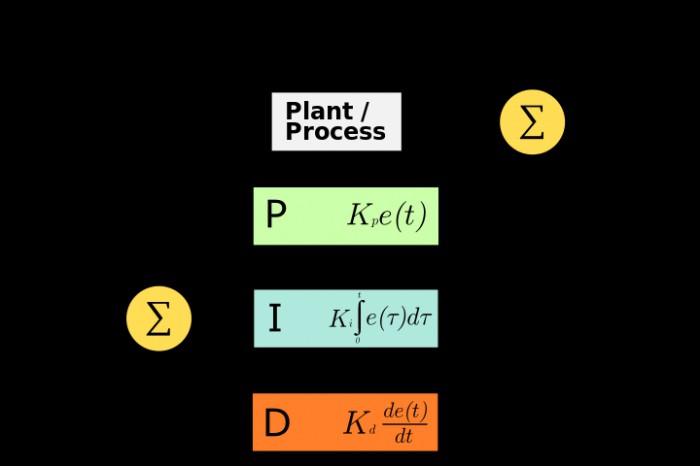
Závěr
Používání takových zařízení v technologii je velmi široké, používají se téměř v jakékoli sféře lidské činnosti. Například Regulátor teploty PID je přítomen v rychlovarné konvici nebo v osobním počítači (v počítači je potřeba nastavit otáčky ventilátorů při zvyšování Teplota CPU).